Z powody ciągle pojawiających się pytań o sposób używania napędu 4×4 w Fordzie postanowiłem przybliżyć ten temat. Omówię napędy kolejno w rocznikach dokładnie dla Forda Explorera. (Dla innych modeli jest to analogiczne tylko roczniki zastosowanych systemów mogą się różnić) : 91 – 94, 95 – 96/7, 97/8 – 2001, 2001 – 2010, 96 – 2002 AWD. Postaram się maksymalnie zredukować kwestie mechaniczne tak aby skupić się głównie na tym kiedy i dlaczego można albo nie można używać danego trybu jazdy, oraz jaka jest procedura załączania.
Lecz zanim przejdziemy dalej warto rozpocząć od słownika:
2WD – 2 Wheel Drive – Napęd przenoszony tylko na tylną oś
4WD – 4 Wheel Drive – Napęd przenoszony na przednią i tylną oś
4WD AUTO – Napęd przenoszony tylko na tylną oś, w przypadku wykrycia poślizgu automatycznie dołączany napę na przednią oś
4WD HIGH – Napęd przenoszony na przednią i tylną oś bez środkowego mechanizmu różnicowego (50% x 50%)
4WD LOW (LOW RANGE) – Napęd przenoszony na przednią i tylna oś bez środkowego mechanizmu różnicowego (50% x 50%) z załączonym biegiem redukcyjnym przełożenie biegu redukcyjnego 2.48:1
AWD – All Wheels Drive – Stały „dynamiczny” napęd na 4 koła
LSD – Limited Slip Differential – Most (dyferencjał) z ograniczonym poślizgiem
PB 4×4 – Push button 4×4 – Zapinanie napędu 4×4 za pomocą przycisku
Reduktor – Skrzynka, która pozwala na rozdział momentu pomiędzy przednią a tylną osią, oraz na załączenie przełożenia redukcyjnego.
Przełożenie redukcyjne LOW – Łopatologicznie bieg niższy od 1
Dyferencjał z przekładnią różnicową – Szczególny przypadek przekładni zębatej, z której żaden z elementów składowych nie jest „zablokowany” co odróżnia ją od przekładni planetarnej. Łopatologicznie przekazuje większy moment do tego koła, które ma „ławiej” posiada mniejszy opór. Dla przykładu jedno koło stoi na asfalcie, a drugie na lodzie. Koło stojące na asfalcie będzie stało, a koło stojące na lodzie będzie mieliło 😉
Ford Explorer 91 – 94 PB 4×4

Zacznijmy od systemu „Push button 4×4” który stosowany był w Fordzie już od lat 80 a zawitał jako pierwszy bodajże w Fordzie Bronco. Jako, że Explorer 1 generacji 91 – 94 został stworzony na podstawie Forda Bronco to równiez i w nim pojawił się ten system.

Układ pozwalał na zdalne (bez wychodzenia z kabiny) załączanie napędu na 4 koła, nawet w trakcie jazdy.
Napęd 4×4 był zapinany za pomocą sprzęgiełek automatycznych zamontowanych w piastach przednich kół.
Przy załączeniu napędu 4×4 moment był przekazywany 50% x 50% pomiędzy przednią a tylną oś.
Brak wciśniętego przycisku oznaczał jechanie w trybie standardowym 2WD czyli napęd tylko na tylną oś.
Naciśnięcie przycisku 4×4 powodowało zapięcie stałego napędu na 4 koła.
Naciśnięcie przycisku 4×4 LOW powodowało zapięcie napędu na 4 koła i biegu redukcyjnego.
Załączenie konkretnego tryby było sygnalizowane zapaleniem się czerwonej lampki przy danym przycisku, oraz kontrolki na desce rozdzielczej. W przypadku problemów z układem przy próbie zapięcia napędu kontrolki się nie zapalały bądź zaczynały migać.
Ford dał możliwość testu samego układu elektronicznego, który steruje systemem 4×4. Moduł 4×4 znajduje się w tylnym lewym nadkolu. Aby go przetestować trzeba wypiąć 5 i 8 pionową wtyczkę, następnie przestawić stacyjkę w pozycje „zapłon” . Poczekać około 5 sek na załadowanie się modułu i przycisnąć znajdujący się na nim przycisk „test”. Jeśli moduł jest dobry odpowie nam 4 mrugnięciami diody. Jeśli moduł ma błąd wewnętrzny dioda będzię świeciła przez 30 min, co świadczy, że trzeba wymienić moduł. Jeżeli dioda się nie zapali, oznacza to, że moduł jest spalony permanentnie.
Ograniczenia systemowe:
– Brak możliwości jazdy na 4×4 przy zmiennej przyczepności np. suchy asfalt – śnieg – suchy asfalt.
– Brak możliwości jazdy na 4×4 podczas opadów deszczu na asfalcie ( chyba że jest wybitnie ślisko )
– Maksymalna prędkość zalecana przez Forda przy zapiętym 4×4 to około 90km/h
Brak możliwości jazdy przy zmiennej przyczepności ( Pełna przyczepność – brak przyczepności) Wynika z braku centralnego mechanizmu różnicowego, który rozdzielałby moment pomiędzy przednią a tylną oś. Niestety ale tylna oś podczas zakrętu przejeżdża krótszą drogę aniżeli oś przednia, czyli podczas zakrętu prędkość kół tylnych musi być mniejsza od prędkości kół przednich bo przebywają one mniejszą drogę w tym samym czasie. Wynika to bezpośrednio z podstawowego wzoru z fizyki V = s/t. Niestety w przypadku tego systemu 4×4 obie osie są jakby spięte na stałe. Czyli obie ich prędkości są takie same. W takim przypadku aby mógł zachodzić ruch coś musi się „poddać”. Przy śliskiej nawierzchni poddają się opony, które się uślizgują, natomiast jak zaczniemy skręcać na 4×4 na suchym asfalcie to możemy usłyszeć charakterystyczne „strzelania” przegubów, bądź krzyżaków. Nie jest to zdrowe dla układu przeniesienia napędu i prędzej czy później coś urwiemy. Padnie najsłabszy element układu.
Zalety systemu:
– Możliwość dynamicznego wyboru systemu jazdy 2WD, 4WD bez wychodzenia z kabiny
– Po zapięciu 4×4 stały napęd (Po zapięcie napędu komputer nie ma wpływu na rozkład mocy)
– Możliwość zapięcia biegu redukcyjnego
System używania konkretnych trybów
2WD
– Przy zwykłej jeździe nie załączamy żadnych przycisków. Standardowo Ford jedzie z napędem na tylną oś. Jest to dopowiedni tryb do jazdy po suchym terenie. W większości przypadków z przyczepnością w tylnym moście pomagają nam tarczki LSD, które zmniejszają maksymalną różnicę prędkości pomiędzy kołem lewym a prawym tylnej osi. Cel jest taki, że jeśli jedno koło stoi na asfalcie, a drugie na lodzie, to z tego koła stojącego na lodzie pewna część momentu zostanie przetransferowana do koła stojącego na asfalcie i auta da radę wyjechać. Rewelacyjny, działający automatycznie system. Niestety po 20 latach najczęsciej po tarczkach nic nie zostało i trzeba je wymienić 😉
4×4 (4WD)
– Napędu 4×4 używamy w przypadku zjazdu z utwardzonej drogi. Tam gdzie koła mają możliwość uślizgu, tak by nie uszkodzić przeniesienia napędu. Możliwe podłoża: Lód, śnieg, szuter, błoto, trawa, ziemia, piasek itp. Warto zwrócić uwagę, że w trybie 4×4 nie powinno się mocno dodawać gazu przy mocno skręconych kołach, jest to związane z faktem, że napęd na przednie koła przenoszony jest poprzez przeguby które bardzo nie lubią takiego traktowania. Na tym rodzaju napędu nie jeździmy na suchej nawierzchni co było wcześniej opisywane.
4×4 LOW RANGE
– Napęd 4×4 z biegiem redukcyjnym. Używamy zawsze gdy wjeżdżamy w większy teren, pod stromą górkę w terenie, bądź planujemy dłuższą zabawę w terenie ( oszczędzimy tym skrzynię biegów). Albo chcemy wyrywać kogoś z bagna bądź z rowu przy drodze. Reduktor dokłada za naszą główną skrzynią biegów kolejne przełożenie o wartości 2.48 : 1. Oznacza to, że prędkość samochodu na danym biegu spada o 2.48 raza, natomiast moment rośnie o 2.48 raza. Auto w tym trybie jest bardzo „mocne” i „dzielne”. Skrzynia ma o wiele łatwiej. Nie wolno używać tego przełożenia na suchym asfalcie.
Instrukcja załączania systemu 4×4.
4WD
– W celu załączenia napędu 4×4 wystarczy jedynie ( przy prędkości do 90km/h) nacisnąć przycisk na desce rozdzielczej. Napęd niezwłocznie zostanie zapięty.
– W celu rozłączenia napędu 4×4 niestety trzeba się zatrzymać. Ponownie wcisnąc przycisk 4×4, poczekać na zgaszenie się kontrolki i cofnąć parę metrów w celu pełnego rozpięcia sie sprzęgiełek automatycznych.
4WD LOW RANGE
1. W celu załączenia napędu 4×4 LOW musimy się zatrzymać
2. Trzymając hamulec wykonujemy kolejne punkty
3. Załączamy napęd 4×4
4. Ustawiamy położenie skrzyni biegów na N
5. Załączamy przyciskiem 4×4 LOW bieg redukcyjny
6. Przełączamy przełożenie skrzybi biegów na żądane przełożenie
7. Puszczamy hamulec i ruszamy.
Wyłączanie biegu redukcyjnego przebiega analogicznie.
Kolejno przejdziemy do systemu stosowanego w rocznikach 95 – 96/97
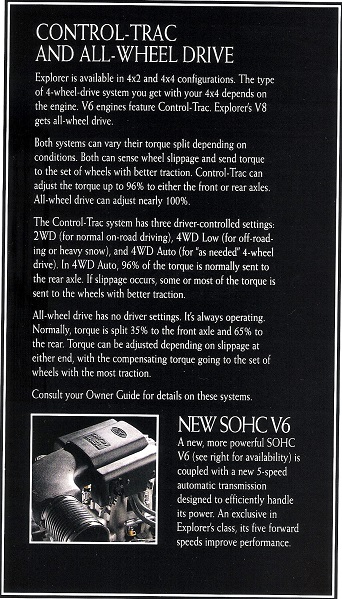
Ford Explorer 95 – 96/7 Control Track 4×4

Ten system oferuje nam 3 tryby pracy:
– 2WD – Napęd tylko na dwa tylne koła
– 4WD Auto – Napęd na 4 koła dołączany automatycznie
– 4WD LOW – Napęd na 4 koła zapięty na stałę 50% x 50% z biegiem redukcyjnym 2.48 : 1 .
W trybie 2WD napędzane są tylko tylne koła identycznie tak jak w poprzednim systemie. Dokładnie tak samo funkcjonuje też tylny dyferencjał z tarczkami LSD, które wspomagają naszą przyczepność.
W trybie 4WD auto komputer Forda sam decyduje kiedy załączyć napęd. Elektroniczny czas „decyzji” wynosi tylko 20ms. Ford dopnie przedni napęd jeśli wykryje różnicę prędkości pomiędzy osią tylną a przednią. Proces decyzyjności polega również na czujnikach ABS za których pomocą Ford określa czy auto w danym momencie skręca czy jedzie prosto, aby być w stanie dobrać odpowiednią różnicę prędkości która spowoduje zapięcie się napędu 4×4. Dopięcie napędu po wykryciu uślizgu następuje w mgnieniu oka. Jeżeli wszystko jest sprawne to nie możliwe jest wyczucie uślizgu tylnej osi przed dopięciem przodu. Newralgicznym punktem układu są dwa czujniki prędkości wału przedniego i tylnego zamontowane na reduktorze. To na ich podstawie ford określa różnicę prędkości obu osi i decyduje o dopięciu napędu. Są to czujniki halotronowe zasilane napięciem 5V. Z tego powodu są niezwykle szybkie i względnie precyzyjne. Dlatego układ jest niezwykle szybki. Wszelkie zażalenia co do dopiniania napędu wynikają tylko i wyłącznie z zaniedbań właścicieli nieświadomych funkcjonowania układu. Brak jakiekolowiek serwisu w tym temacie powoduje radykalne wydłużenie czasu zapięcia się przodu. Napęd zapinany jest dwojako. Poprzez elektromagnes w środku reduktora i wolnobierzkę na przednim moście. Wolnobierzka daje tą zaletę, że przy braku momentu przekazywanego z reduktora na przedni wał, przednie i tylne koła są w pełni niezależne. Uważam, że był to najlepszy układ 4×4 który występował w Fordzie. Załączenie trybu sygnalizowane jest poprzez zaświecenie się kontrolki 4×4 na desce rozdzielczej. Wszelkie błędy sygnalizowane są mruganiem kontrolek, bądź brakiem ich załączenia.
W trybie 4WD LOW. Posiadamy już stały napęd na 4 koła. Komputer nie bada uślizgu tylnych kół a stale spina napęd 50 x 50, wraz z przełożeniem redukcyjnym 2.48 : 1. Załączenie sygnalizowane jest poprzez zaświecenie się kontrolki 4×4 LOW na desce rozdzielczej.
System używania konketnych trybów
2WD
Analogicznie jak w systemie poprzednim trybu 2WD używamy przy standardowej jeździe. Mamy napęd tylko na tylną oś.
4WD AUTO
Trybu możemy używać niemal, że zawsze kiedy tylko chcemy. Komputer sam będzie decydował kiedy dopiąć przedni napęd. Jest to o tyle dobre, że w przypadku braku uślizgu ciągną tylko tylne koła. Pomijając już sam fakt ekonomii to możliwe jest jeżdżenie na tym trybie również na suchej powierzchni. Nie ma ku temu żadnych ograniczeń. Nie uszkodzimy tym sposobem żadnych podzespołów napędu, ponieważ komputer nie dopuści do sytuacji by bez uślizgu ciągnęły obie osie, chyba, że znacznie uszkodzimy układ to w trybie awaryjnym może on wejść w tryb permanentnego napędu 4×4. Oczywiście każdy zjazd z utwardzonej osi śmiało możemy poprzedzić zapięciem 4×4 Auto. Wszelki wjazd w błoto piasek itp. Ważna uwaga. Ford nie zaleca jazdy w tym trybie z prędkościami przekraczającymi 90km/h tyczy to się systemu dopinania napędu. Przy wyższej prędkości może się coś uszkodzić przy nakłym dopięciu przedniej osi. Osobiście jeździłem szybciej z napędem 4×4 AUTO, natomiast jeśli nie posiadacie dokładniejszej wiedzy mechanicznej nie jest to zalecane i trzymajcie się zaleceń Forda. Jedno ograniczenie. Byłbym daleki od dodawania gazu w podłogę przy maksymalnym skręceniu kół. Moment na przednie koła przekazywany jest również za pomocą przegubów.
4WD LOW
Tryb z przełożeniem redukcyjnym używamy w takich samych warunkach jak w poprzednim systemie. Grubszy teren, chęć oszczędzenia skrzyni w terenie. Wszędzie tam gdzie potrzebujemy bezkompromisowej przyczepności z napędem na 4 koła, oraz dużego mometnu. Również wszelkie strome podjazdy na śliskim. Wyrywania kogoś z bagna bądź z rowu przy drodze. Tego tryby NIE WOLNO używaż na asfalcie. Przypominam mamy wtedy na sztywno spiętą przednią i tylną oś.
Zalety systemu:
– Możliwość jazdy 4×4 Auto na nawierzchniach suchych
– Możliwość jazdy 4×4 Auto na nawierzchniach o zmiennej przyczepności
– Przemyślana konstrukcja układu napędu z wolnobierzką
– Bardzo szybka reakcja komputera na uślizg kół i błyskawiczne dopięcie
– Sztywne napięcie napędy w trybie 4×4 Low
– Niska zawodność systemu
– Rewelacyjne możliwości diagnostyki komputerowej systemu przeniesienia napędu
Wady systemu :
– Awaryjność przy braku wiedzy elektronicznej użytkowników ( Montaż przekaźników bez zabezpieczenia prądu wstecznego cewki )
– Newralgiczny element GEM, który w 99% zostaje uszkodzony przez nieprofesjonalne, szplajsowate naprawy instalacji elektrycznej, stosowanie niskiej jakości przekaźników
– Więcej czujników niż w systemie PB 4×4
Instrukcja załączania systemu 4×4. :
4×4 Auto
– W celu załączeniu napędu 4×4 auto wystarczy tylko i wyłącznie przekręcić przełącznik 4×4 na pozycję Auto. Można to robić w każdym momencie jazdy. Zapali się kontrolka na desce.
– W celu rozłączenia trybu wystarczy przełączyć przełącznik na położenie 2WD. Nie trzeba stawać ani cofać.
4WD LOW
1. W celu załączenia napędu 4×4 LOW musimy się zatrzymać
2. Trzymając hamulec wykonujemy kolejne punkty
3. Załączamy napęd 4×4 Auto
4. Ustawiamy położenie skrzyni biegów na N
5. Załączamy przyciskiem 4×4 LOW bieg redukcyjny
6. Przełączamy przełożenie skrzyni biegów na żądane przełożenie
7. Puszczamy hamulec i ruszamy.
Wyłączanie biegu redukcyjnego przebiega analogicznie.
Ford Explorer 97/8 – 2001 I 2001 – 2010 CT ATA 4×4 (Control Track All Time Auto 4×4)
1997 – 2001

Ten system oferuje nam również 3 tryby pracy:
– Auto – Napęd 4×4 dołączany automatycznie
– 4×4 HIGH – Napęd 4×4 spięty na sztywno rozkład momentu 50% x 50%
– LOW – Napęd 4×4 spięty na sztywno z biegiem redukcyjnym LOW

2001 – 2005

2006 – 2010

Jest to system który cały czas nadzoruje czy nie wystepuje uślizg, czy nie ma potrzeby dopięcia napędu na 4×4. Standardowo wybrany jest tryb AUTO. Bez przeróbek nie ma możliwości odłączenia automatycznego dołączania przodu. W każdym przypadku przy uślizgu tylnej osi błyskawicznie zostanie dopięty przód. W tym systemie zrezygnowano całkowicie z wolnobierzki w przednim moście. Zapięcie napędu występuje jedynie w reduktorze. Nie ma żadnego ograniczenia prędkości przy jeździe w trybie auto. Dzięki temu, że bez uślizgu auto ciągnie jedynie na tylnych kołach, można poruszać się po asfalcie bez obawiania się, że coś uszkodzimy. System działa równie sprawnie i szybko co poprzedni system. Również opiera sie o czujniki ABS i czujniki prędkości wałów przedniego i tylnego.
W trybie HIGH system spina na stałę wał przedni z tylnym uzyskując rozkład momentu 50% na 50%. ( Precyzyjnej jest to rozkład prędkości, ale dla uproszczenia możemy mówić o momencie). Komputer przestaje badać uślizg tylnych kół. Mamy stały napęd na 4 koła. Załączenie sygnalizowane jest poprzez zaświecenie się kontrolki na desce rozdzielczej. Wszelkie błędy są definiowane poprzez nie zapalenie się kontrolki, bądź mruganie kontrolek.
Tryb LOW jest analogicznym trybem co w poprzednim systemie. Stały napęd 4×4 wraz z przełożeniem redukcyjnym 2.48 : 1 . Załączenie sygnalizowane jest poprzez zaświecenie się kontrolki 4×4 LOW na desce rozdzielczej.
System używania konkretnych trybów
AUTO
– Jest to standardowy tryb pracy. Nie jest możliwe jego wyłączenie. Nie powoduje on zapalenia się żadnej kontrolki na desce rozdzielczej. Stosujemy go przy normalnej jeździe. Nawet przy zjeździe w lekki teren w przypadku uślizgu błyskawicznie dopnie się przód dając nam pełny napęd 4×4 ze spiętymi wałamy przednim i tylnym
4×4 HIGH
– Tryb stałego napędu na 4 koła, w których prędkości wałów przedniego i tylnego są jednakowe. Nie wolno poruszać się w tym trybie na suchym. Grozi to uszkodzeniem układu napędowego. Idealny jeśli mamy doczynienia ze śliskim podłożem. Np. Jazda po piasku, błocie, trawie itp. Nie ma żadnego opóźnienia przy zapięciu napędów. Ciągle jedziemy na 4 butach
4×4 LOW
– Analogicznie jak w poprzednim systemie 4×4 spięte na stałe z przełożeniem redukcyjnym. Używamy w przypadku cięższego terenu, stromych śliskich podjazdów, wyrywania kogoś z bagna bądź z rowu przy drodze, w celu oszczędzania skrzyni w terenie. Zmniejszenie prędkości na biegach, przy analogicznym zwiększeniu momentu na kołach.
Zalety systemu:
– Możliwość jazdy Auto na nawierzchniach suchych
– Możliwość jazdy Auto na nawierzchniach o zmiennej przyczepności
– Bardzo szybka reakcja komputera na uślizg kół i błyskawiczne dopięcie
– Sztywne zapięcie napędów w trybie 4×4 HIGH i LOW
– Niska zawodność systemu
– Rewelacyjne możliwości diagnostyki komputerowej systemu przeniesienia napędu
– Mniej komponentów czynnych jak w poprzednim systemie
Wady systemu :
– Brak wolnobierzki
– Brak możliwości wyłączenia tryby AUTO
– Awaryjność przy braku wiedzy elektronicznej użytkowników ( Montaż przekaźników bez zabezpieczenia prądu wstecznego cewki )
– Newralgiczny element GEM, który w 99% zostaje uszkodzony przez nieprofesjonalne, szplajsowate naprawy instalacji elektrycznej, stosowanie niskiej jakości przekaźników
– Więcej czujników niż w systemie PB 4×4
Instrukcja załączania systemu 4×4. :
4×4 Auto
– W celu załączeniu napędu 4×4 HIGH wystarczy tylko i wyłacznie przekręcić przełącznik 4×4 na pozycję HIGH ( Wcisnąć przycisk HIGH w nowszych wersjach) . Można to robić w każdym momencie jazdy. Zapali się kontrolka na desce.
– W celu rozłączenia trybu wystarczy przełączyć przełącznik na położenie AUTO( Przycisnąć ponownie przycisk AUTO w nowszych wersjach) . Nie trzeba stawać ani cofać.
4WD LOW
1. W celu załączenia napędu 4×4 LOW musimy się zatrzymać
2. Trzymając hamulec wykonujemy kolejne punkty
3. Załączamy napęd 4×4 HIGH
4. Ustawiamy położenie skrzyni biegów na N
5. Załączamy przyciskiem 4×4 LOW bieg redukcyjny
6. Przełączamy przełożenie skrzybi biegów na żądane przełożenie
7. Puszczamy hamulec i ruszamy.
Wyłączanie biegu redukcyjnego przebiega analogicznie.
Ostatnim systemem który został do omówienia jest system AWD Stosowany w Fordzie Explorerze V8 1996 -2001 i Mercurym Mountainerze 97 – 2002
Ford Explorer V8 96 – 2001 Mercury Mountainer 97 – 2002 AWD ( ALL Wheels Drive)

System jest prosty ale bardzo ciekawy. W przypadku pełnej przyczepności obu osi na przednie koła transferowane jest 35% momentu a na tylne 65%. Natomiast w przypadku uślizgu jednej z osi większy moment z niewielkim opóźnieniem transferowany jest do osi która ma większą przyczepność. Powoduje to:
1. Możliwość jazdy na suchej nawierzchni
2. Znakomitą przyczepność na śliskiej nawierzchni
3. Kompletna bezobsługowość z punktu widzenia kierowcy
Takie cuda możliwe są za dzieki sprzęgle wiskotycznym, o którym nie będę teraz więcej pisał 😉 Może w przyszłości. To dzięki niemu możliwy jest płynny rozkład momentu obrotowego.

Zdecydowanie wadą układu są koszty naprawy w przypadku awarii oraz brak reduktora.
Ciekawostką jest fakt, że początkowo projektanci Forda chcieli wrzucić do Explorera V8 standardowy sytem jak jest przy silniku V6 95 – 2001, niestety doszli do wniosku że wraz ze skrzynią 4R70W nie zmieszczą tego. Z tego względu rocznik 96 V8 był oferowany tylko z napędem na tył. Dopiero w 97r dodali możliwość zakupu pojazdu z napędem AWD. Fanatycy wkładają do auta cały komplet z Forda F150 i uzyskujemy wtedy zbliżony układ jak przy silniku V6 wraz z reduktorem.
Wraz z rokiem 97 wprowadzony został jeszcze jeden bajer. Regulacja wysokości zawieszenia :

System był stosowany w latach 97 – 98 w wersji V8 AWD RWD, oraz V6 RWD.
System zakłada dynamiczną regulację twardości 4 amortyzatowów, utrzymywanie stałego poziomu, oraz podnoszenie w przypadku przestawienia w tryb off road.
Tryb Off road powoduje:
1. Podniesienie pojazdu o 2 cale
2. Maksymalne utwardzenie wszystkich amortyzatorów
Może kiedyś bardziej przybliżę fenomen i wszelkie funkcje układu ARC 😉
Mam nadzieję, że informacje zawarte w tym poradniku będą pomocne.
Na koniec przypominam żę w terenie używamy jedynie przełożeń 1 i 2. Z jakiego wzgłędu opisałem w felietonach o skrzyniach biegów.
Jak obsługiwać skrzynię automatyczną w Fordzie Explorerze cz.1
Jak obsługiwać skrzynię automatyczną w Fordzie Explorerze cz.2 (Elementy eks.)
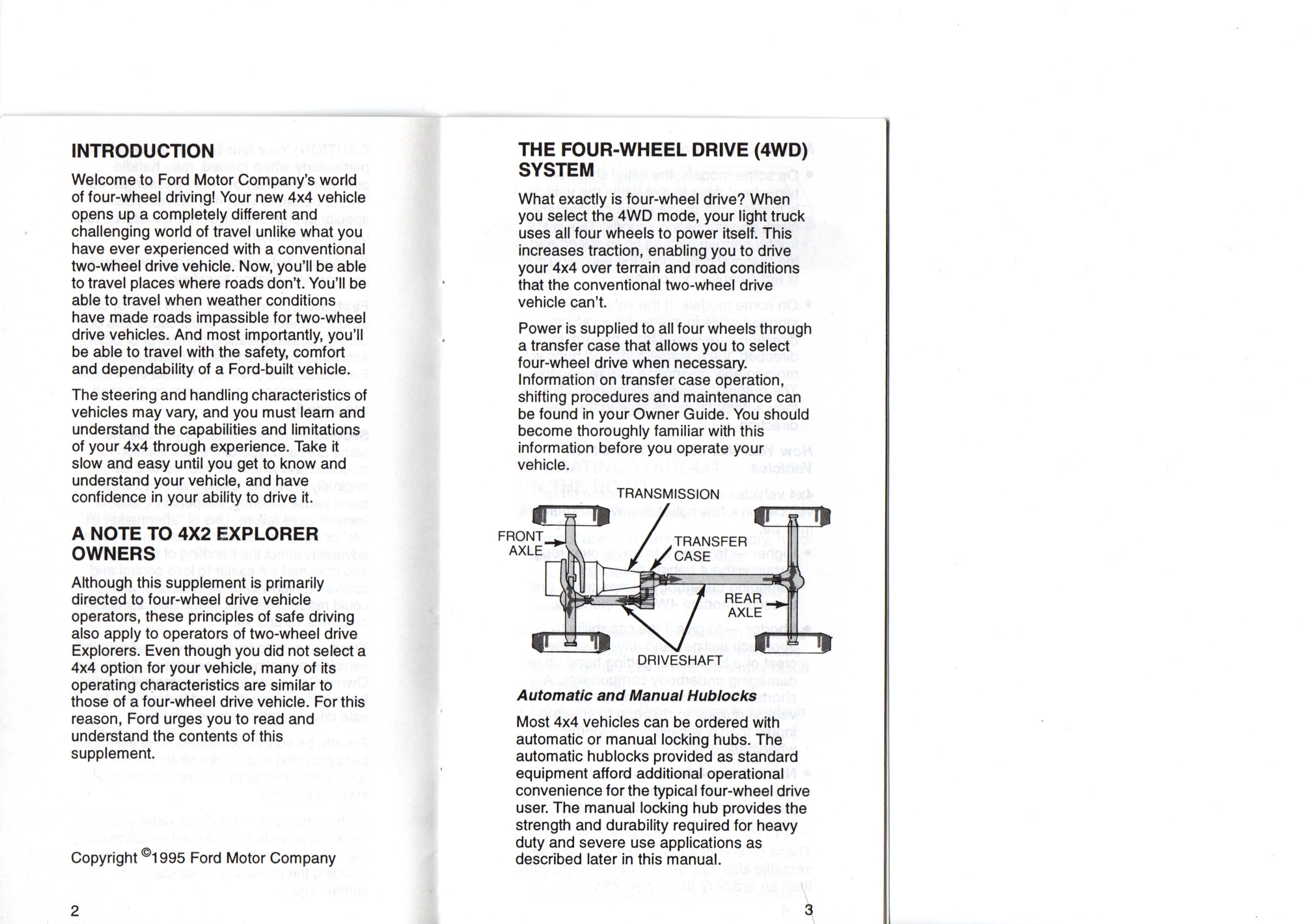
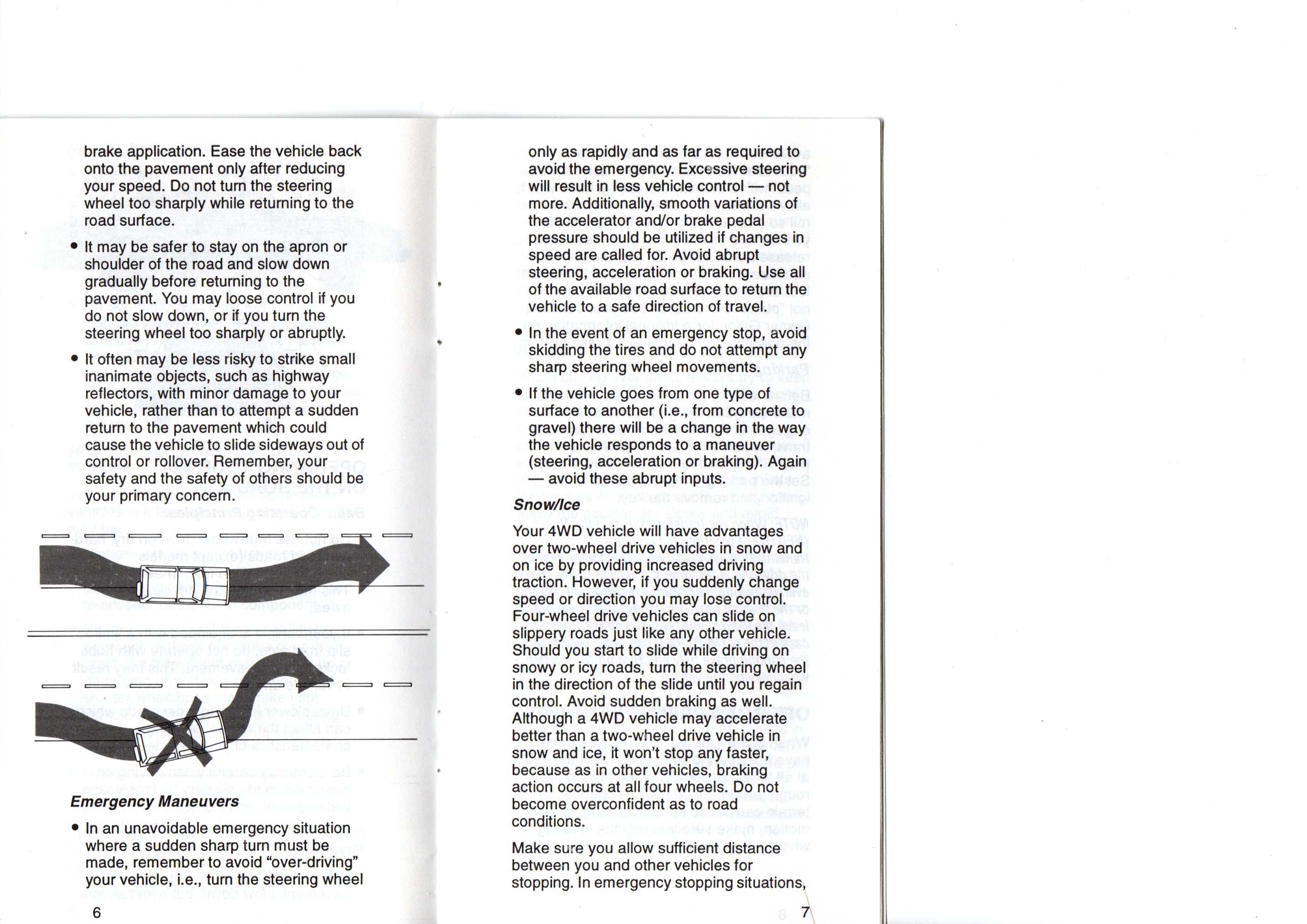
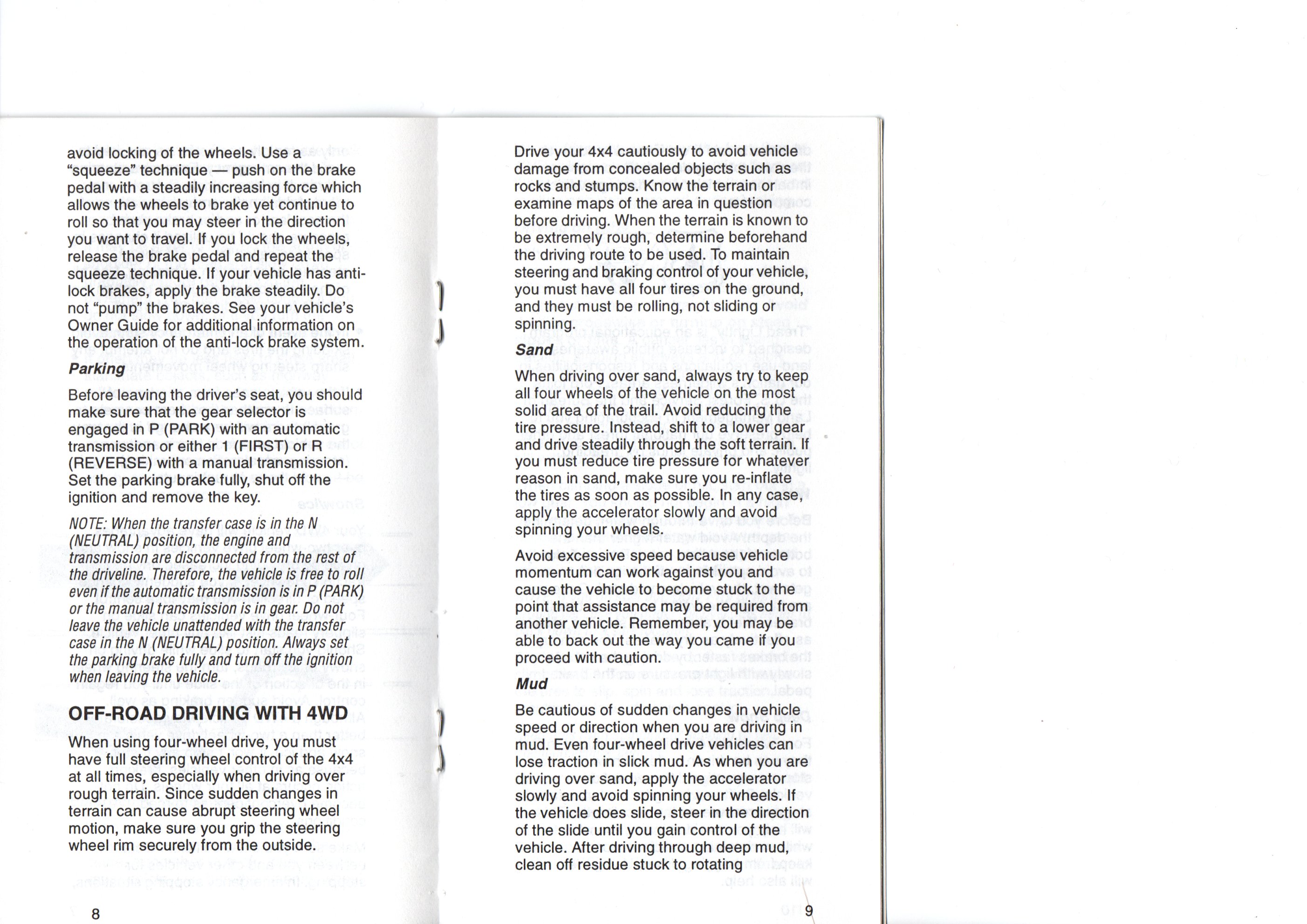
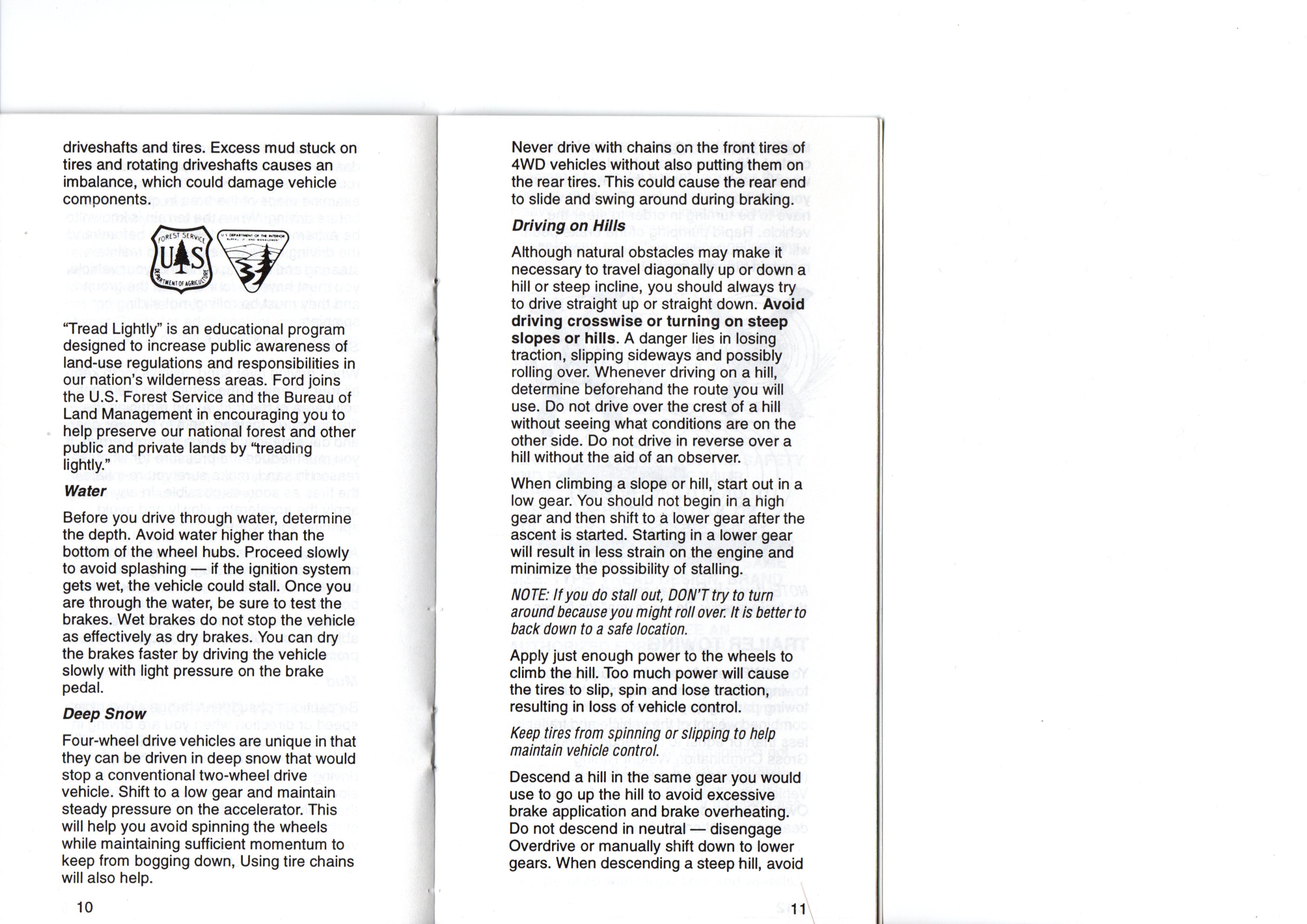
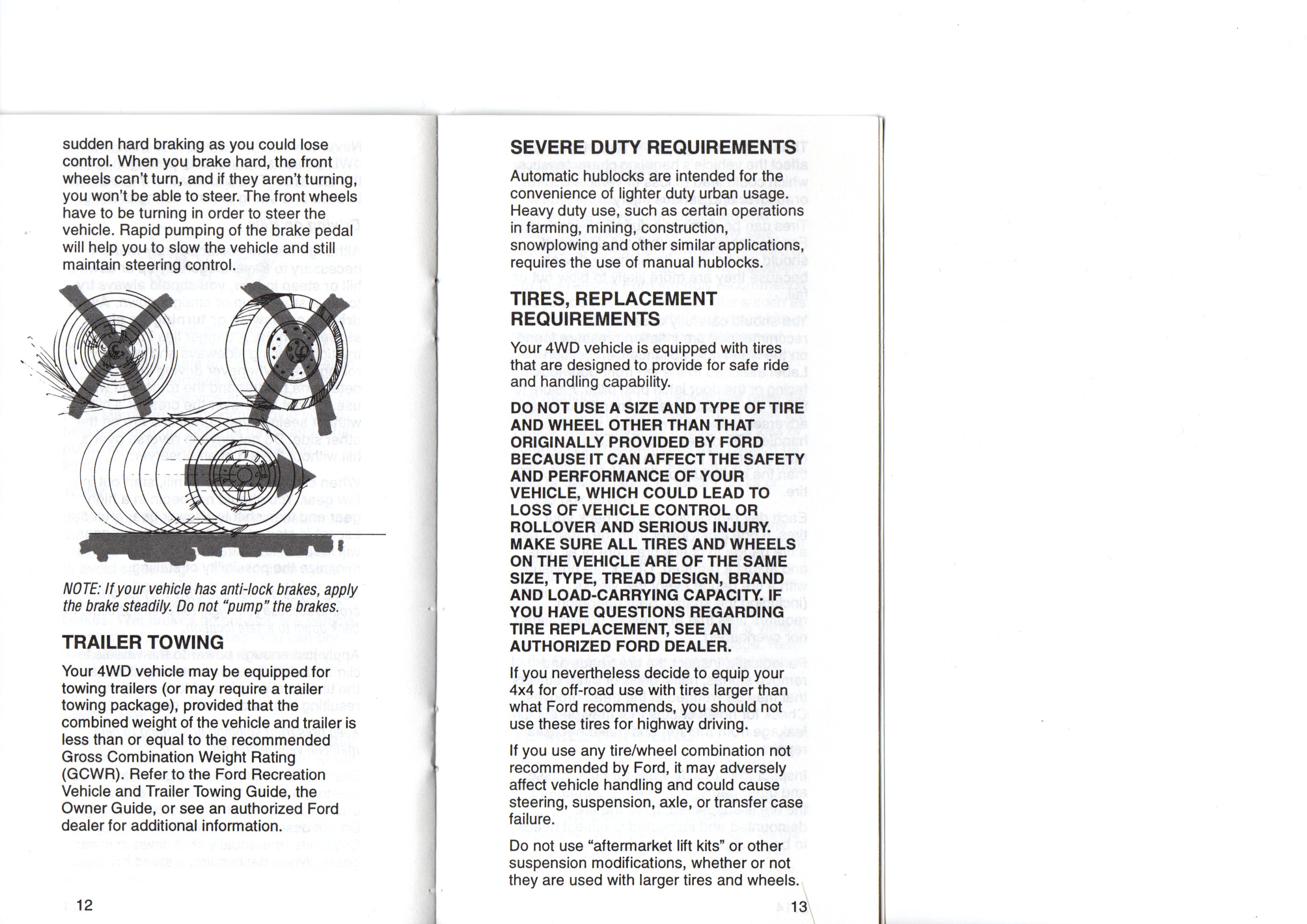
Poniżej załączam też skany książeczki ” 4 Wheeling with Ford ” W której można znaleźć jeszcze dokładniejsze opisy działania wyżej wymienionych systemów jazdy.

Autor. Adam Kamiński